Mikey the robot pet was my third experiment at building a robot. Keep in mind I wasn't thinking about hands, a face, arms and all the other stuff that people think about when they hear the word robot. Movies like Star Wars have for ever changed how we view robots. But from an experimenters view, building a simple moving platform using computer control for motion and navigation from scratch is challenging enough. So I started on my third robot project (some day I'll upload pictures of the first two attempts). Click here to see a short video of him running around.
The heart of Mikey is an 8052AH computer chip which has built into a BASIC interrupter which means simply I can hook up the chip to a PC to down a BASIC program to it, disconnect the PC and off it goes. The circuit I designed is basically the same one seen many places when it comes to the 8052 chip. Basically the computer has 16K of RAM and 16K EPROM which can hold alot more code than you may think. The photos show the history of the construction. I apologize for the poor quality of of the pictures since they we digitized from old VHS video tapes 10 years old. One of the keys to building a robot from scratch is that you make do with things you find around the house and with what's in your junk box. The rest you go to the hard ware store and buy.
Basic Design Concept: I wanted a 3 wheel triangle design with 2 power wheels and one idler. This design allows for forward and reverse direction by reversing both motors and allows for tight turning left or right by running the motors in opposite directions. It is also easy for it to go over bumps in floors and carpets (like those aluminum metal strips holding carpet down between rooms).
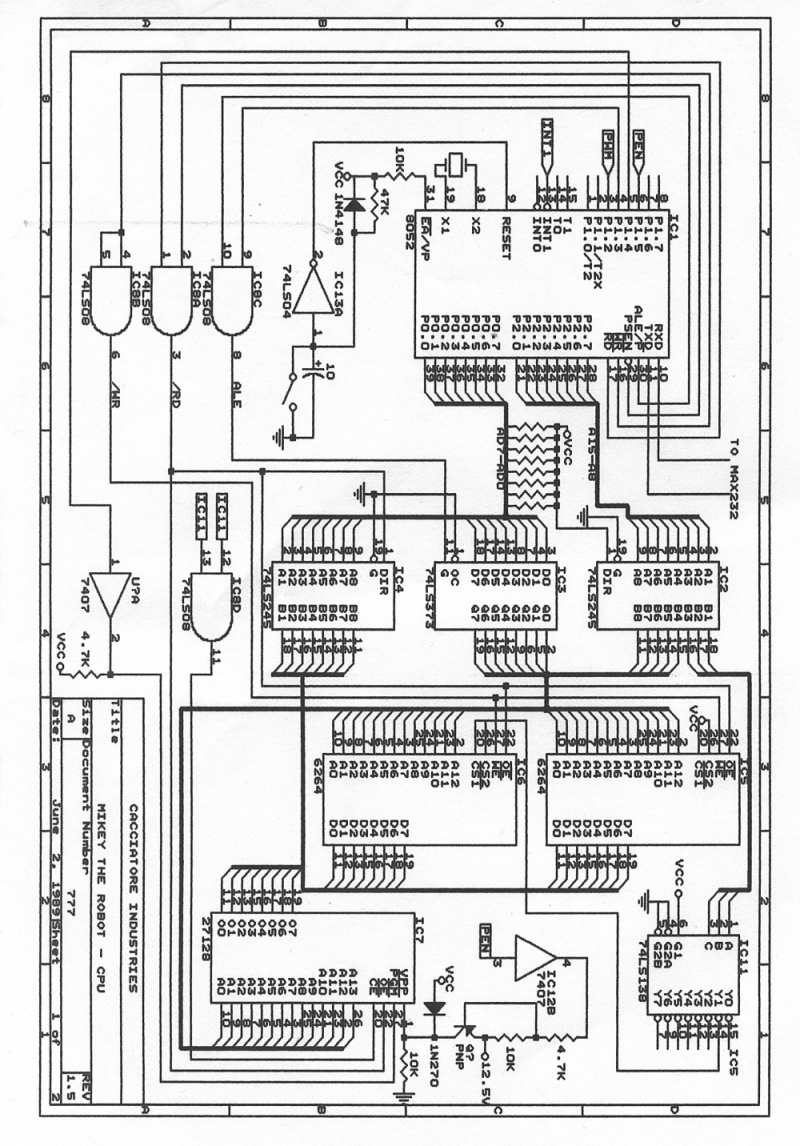
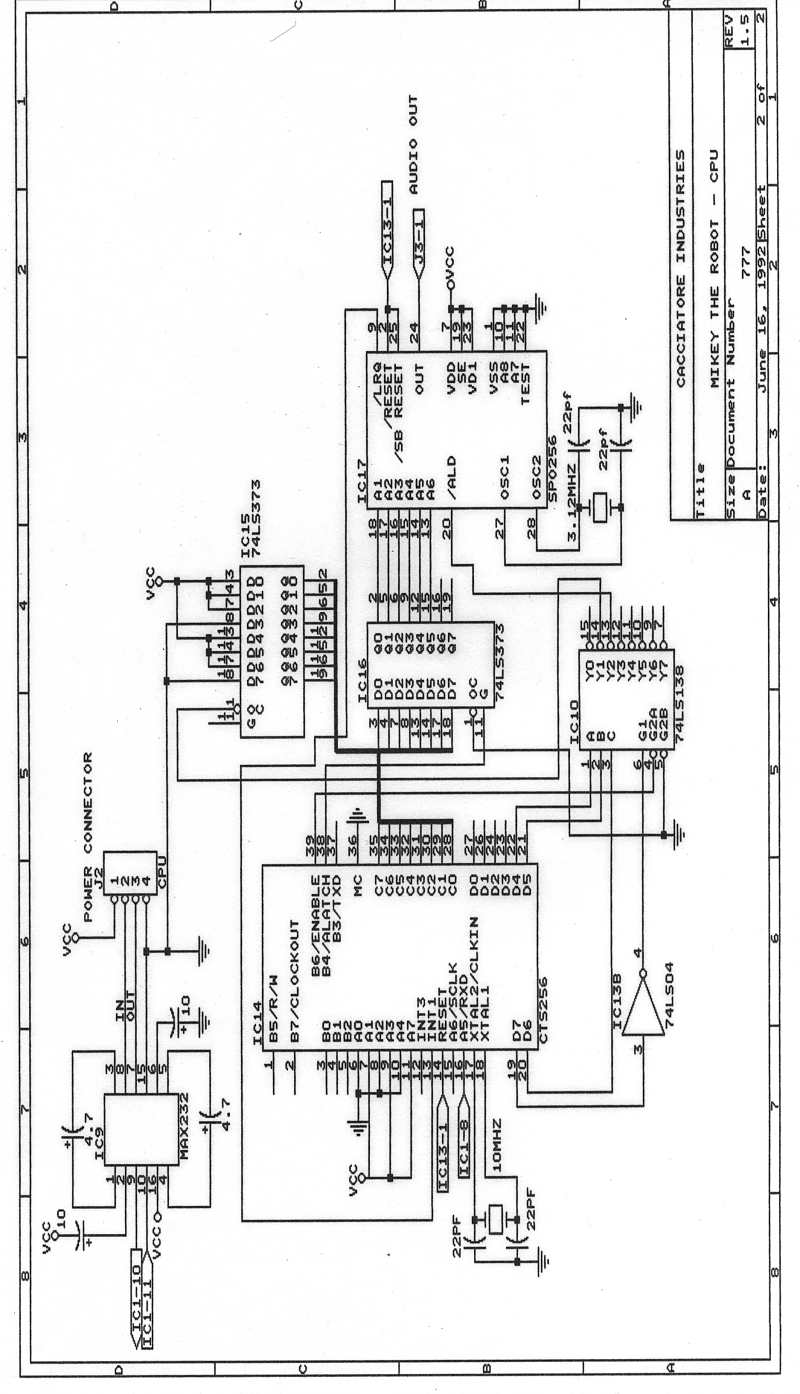
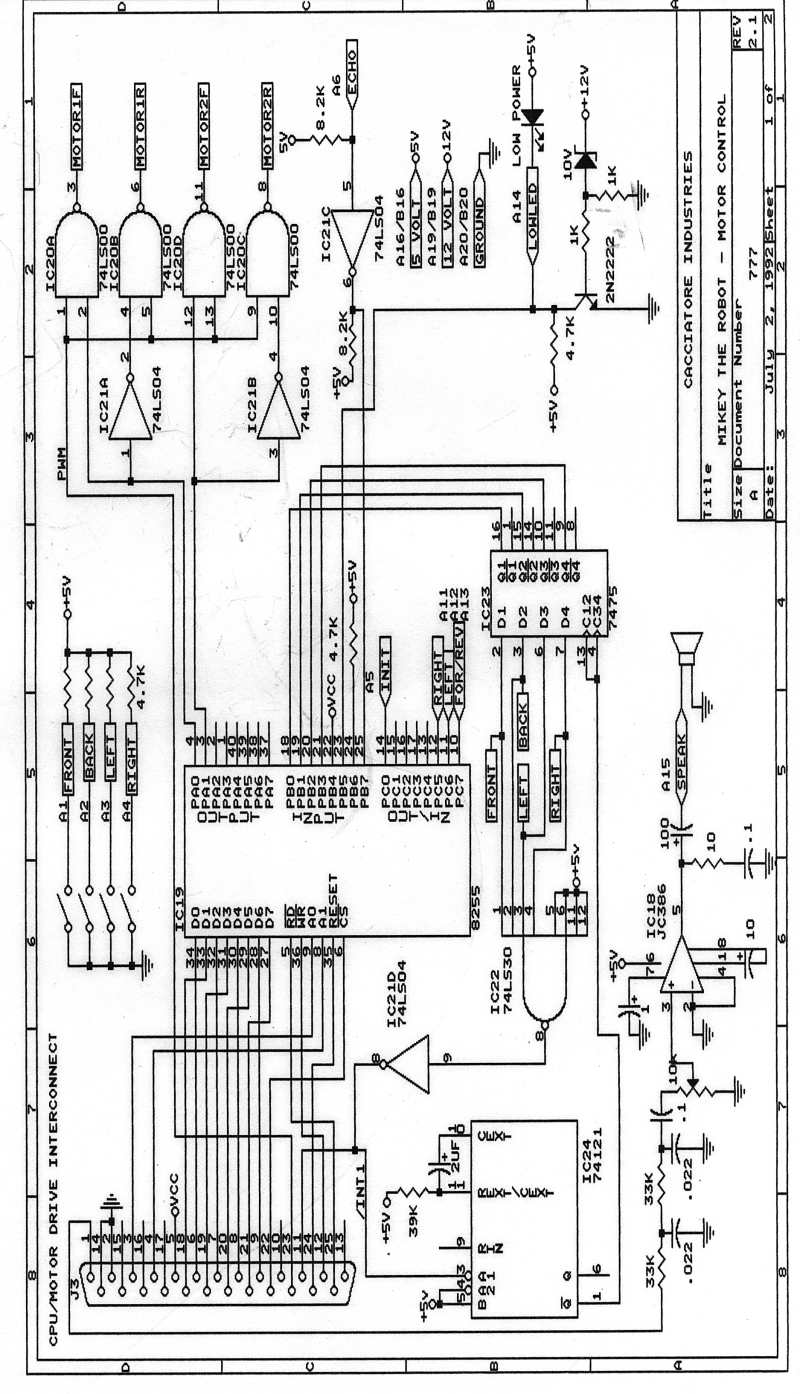
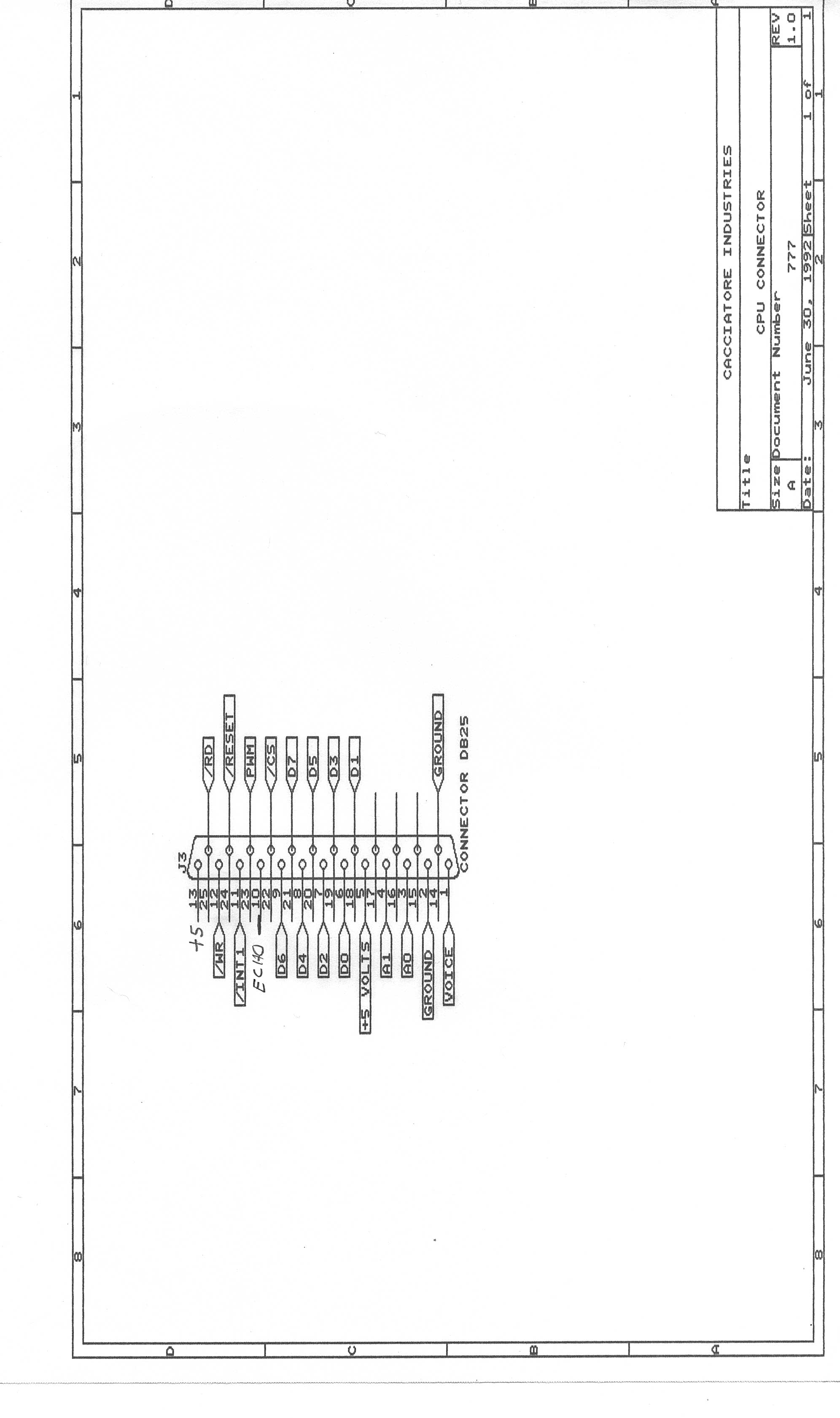
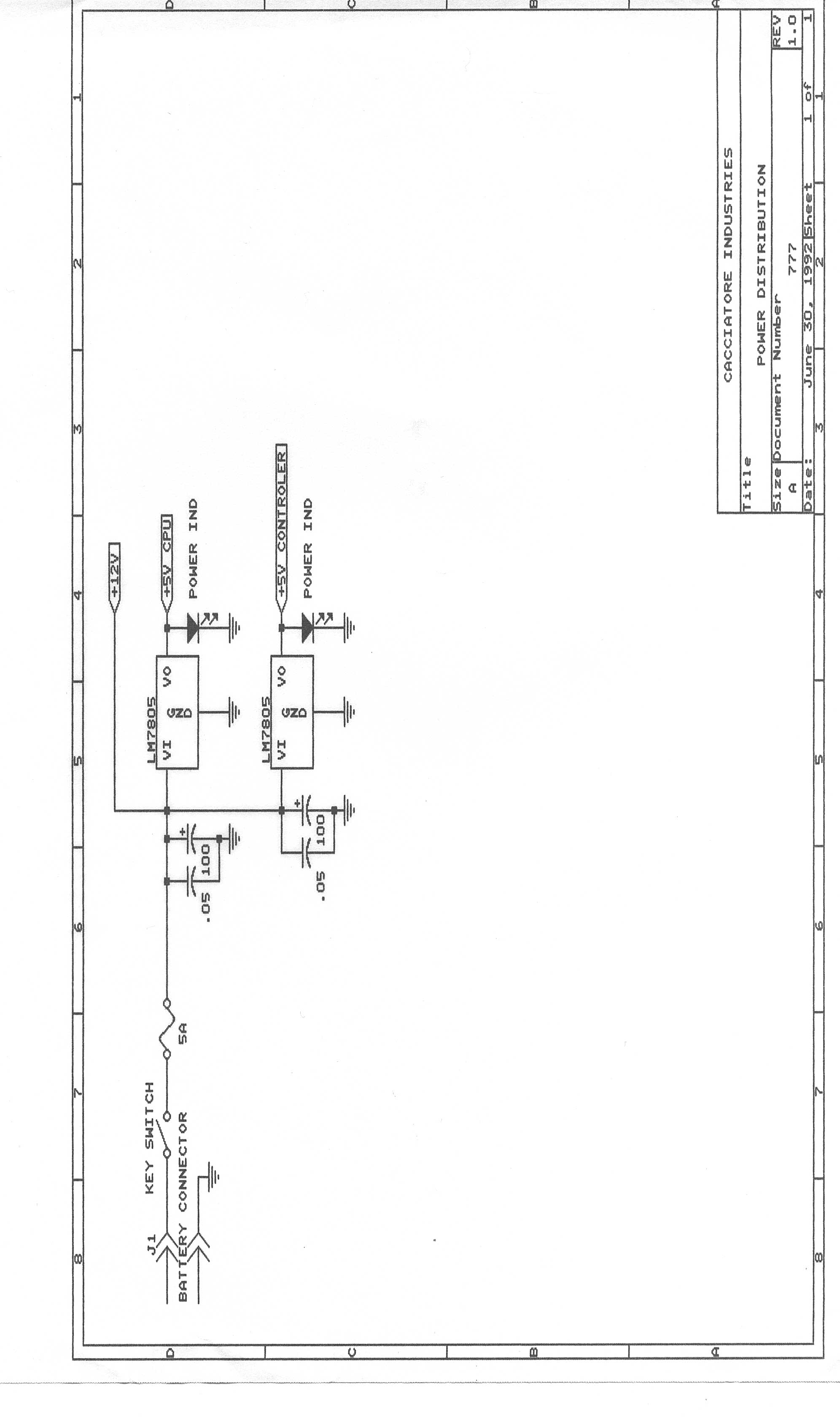
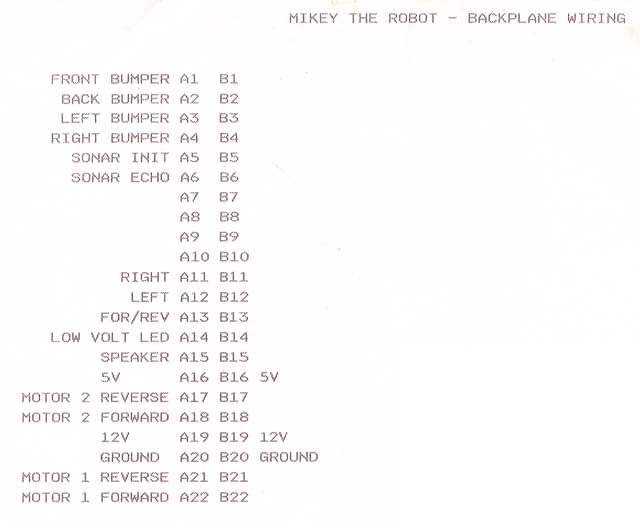
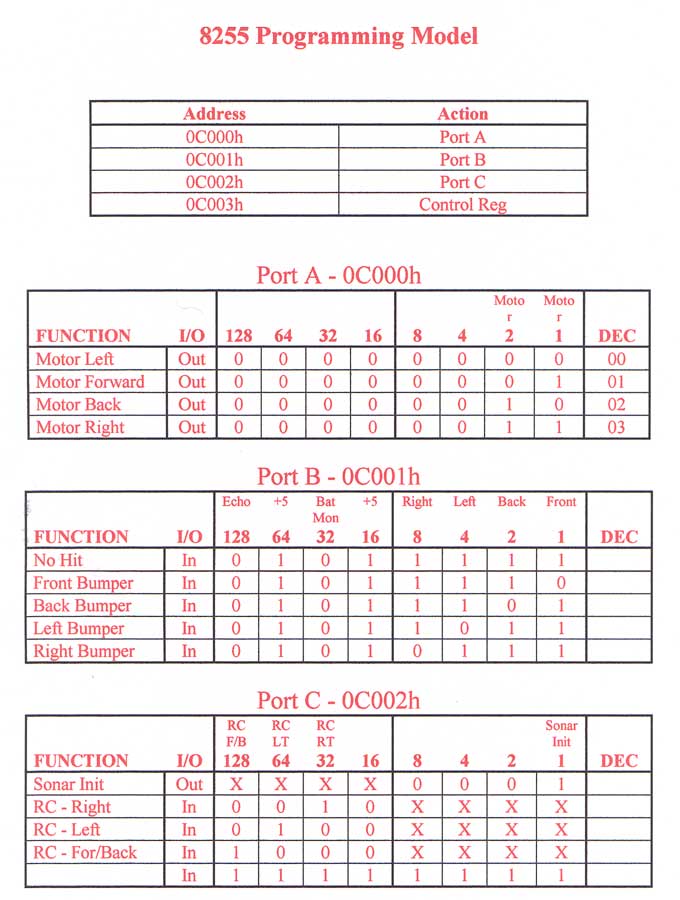
Circuit Design: The whole robot is centered around the Intel 8052AH CPU along with Radio Shack Text to Speech and Speech Processors, 8255 Interface and miscellaneous transistors and parts. Below are the schematics for the robot:
 |
 |
 |
 |
 |
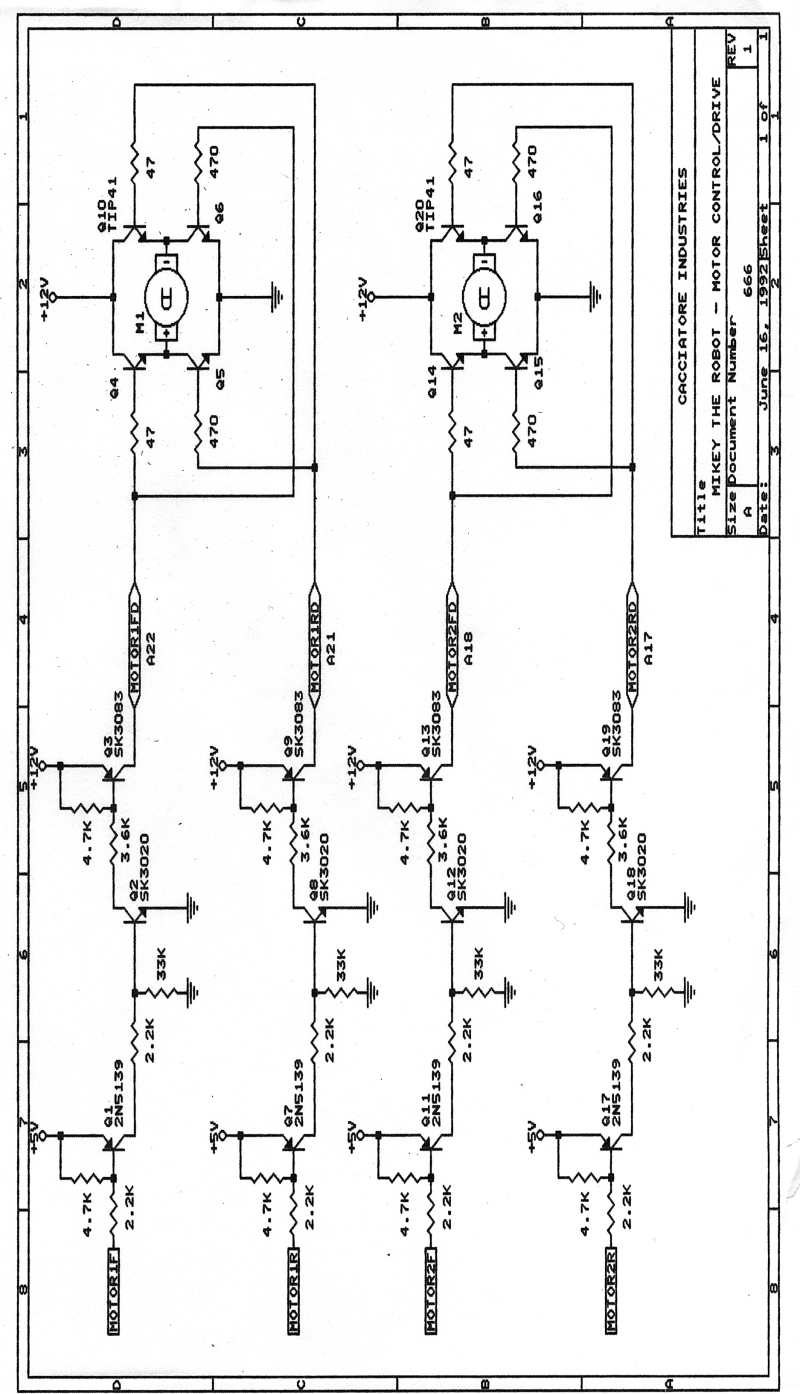 |
| 8052 CPU Part 1 | 8052 CPU Part 2 | Motor and Voice Amp | CPU Connector | Power Bus | Motor Control |
 |
 |
 |
 |
 |
|
| Backplane | Board Layout |
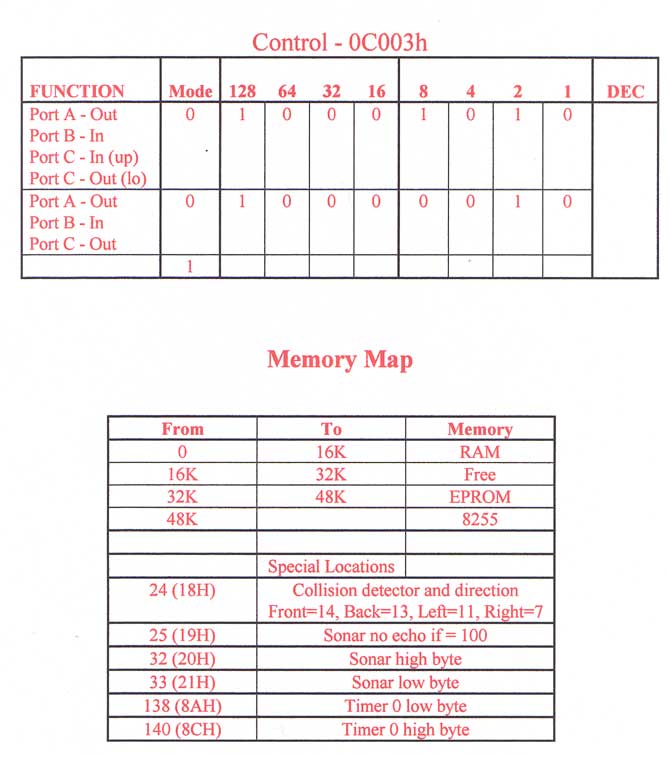
Memory Map Part 1 |
Memory Map Part 2 |
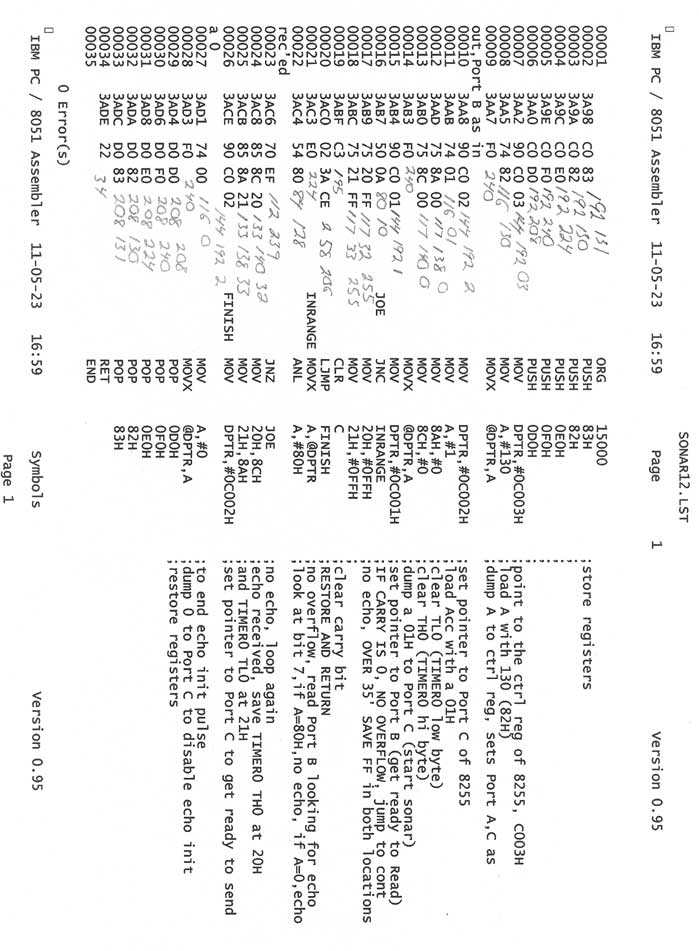
Sonar Machine Lang Listing |
Schematics are Copyrighted 2003 by Joe Cacciatore
 |
 |
| This is how Mikey started out life. The 12 volt motorized wheels were the key to building this. | This picture shows the angle aluminum and battery besides other stuff. |
 |
 |
| Top right will be the CPU board, bottom left the controller board. | Radio Shack Voice Synthesizer and Text to Speech chips were used. |
 |
 |
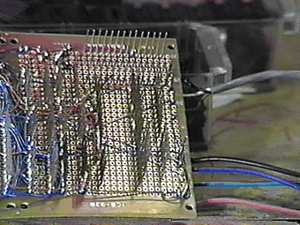
| Close up showing angle aluminum on wheel housings. | Beginnings of the 8052 CPU board wiring. |
 |
 |
| The moving platform almost finished. | Top side of 8052 CPU board. |
 |
 |
| I at first tried using this small idler wheel but it didn't work too good. | More wiring of the CPU board. |
 |
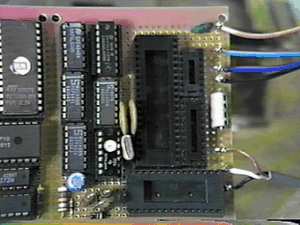 |
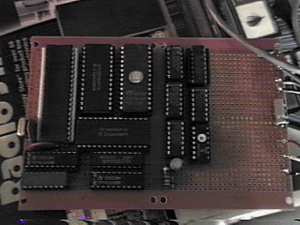
| The finished 8052 CPU with RAM and EPROM and I/O chips. | Sockets going in for the Text to Speech processor and Voice Synthesizer. |
| Goto Part II | |